以下のセクションでは、Dell SonicWALL による HA 機能の実装の概要を説明します。
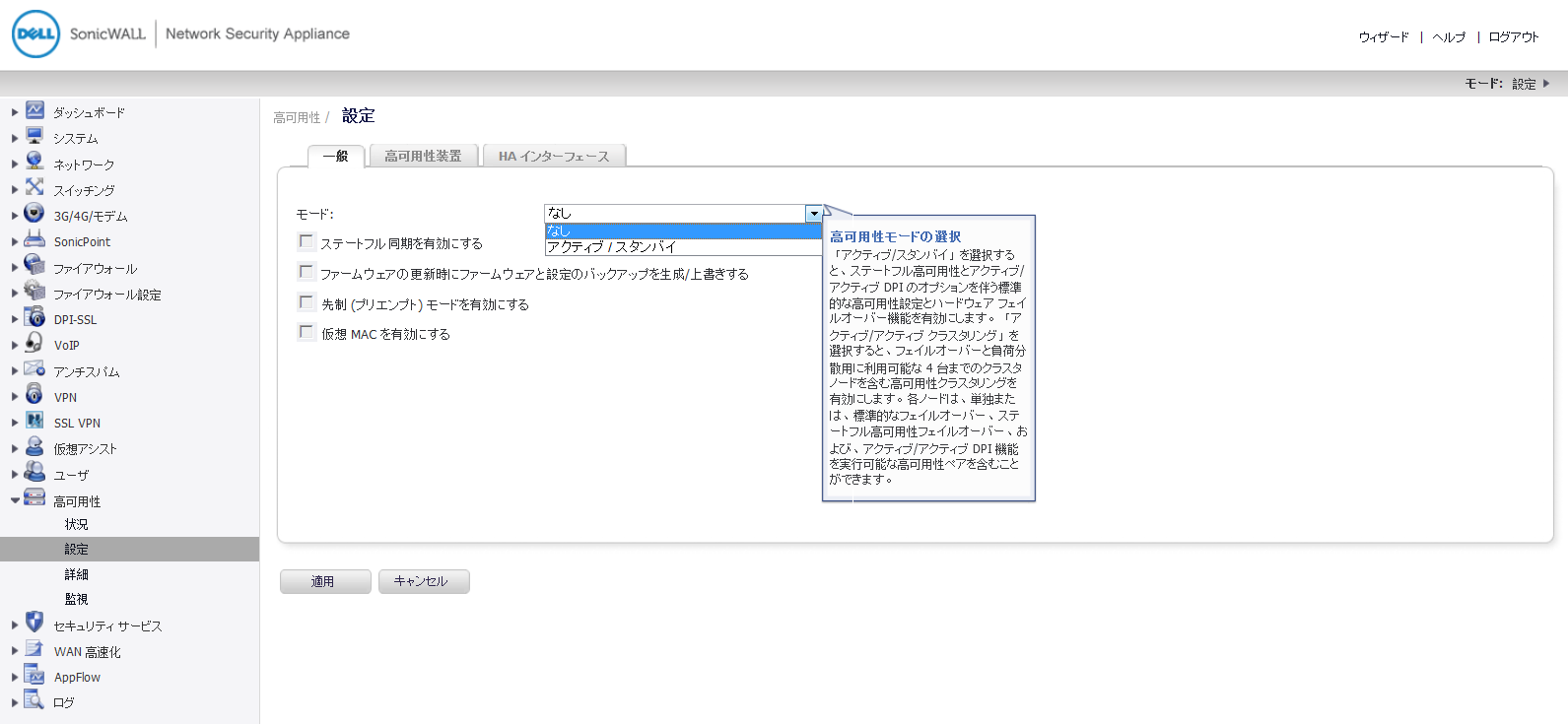
高可用性機能の 4 つの動作モードは、「高可用性 > 設定」ページの「一般」タブにあるドロップダウン メニューから選択できます。
|
•
|
アクティブ/スタンバイ - アクティブ/スタンバイ モードでは、2 つの同一のファイアウォールを高可用性ペアとして構成することで、基本的な高可用性を実現します。アクティブ装置はすべてのトラフィックを処理します。スタンバイ装置は設定情報を共有し、アクティブ装置が停止した場合にただちに動作を引き継いでネットワーク接続の持続性を確保します。既定では、アクティブ/アクティブ モードはステートレスです。つまり、フェイルオーバー後にネットワーク接続と VPN トンネルを再確立する必要があります。ステートフル同期のライセンスを追加して有効化すると、アクティブ/スタンバイ モードでこれを回避できます。このステートフルな高可用性モードでは、アクティブ装置とスタンバイ装置の間で動的な状態が常時同期されます。アクティブ装置に障害が発生すると、既存のネットワーク接続に中断を発生させることなくスタンバイ ファイアウォールがアクティブの役割を引き継ぐので、ステートフル フェイルオーバーとなります。
|
|
•
|
アクティブ/アクティブ DPI - アクティブ/アクティブ DPI (精密パケット検査) モードは、アクティブ/スタンバイ モードと並行して使用できます。アクティブ/アクティブ DPI モードを有効にすると、侵入防御 (IPS)、ゲートウェイ アンチウイルス (GAV)、アンチスパイウェアなどのプロセッサ使用率の高い DPI サービスはスタンバイ ファイアウォールが処理を実行し、ファイアウォール、NAT、その他のトラフィックなどのサービスはアクティブ ファイアウォールが同時的に処理を実行します。
|
|
•
|
アクティブ/アクティブ クラスタリング - このモードでは、複数のファイアウォールがクラスタ ノードとしてグループを形成し、複数のアクティブ装置が DPI の処理やネットワーク負荷を分散しながらトラフィックを処理します (複数のゲートウェイとして動作)。各クラスタ ノードは、ステートフル高可用性ペアとして動作する 2 つの装置から構成されます。アクティブ/アクティブ クラスタリングでは、負荷分散に加えてステートフル フェイルオーバーがサポートされます。各クラスタ ノードを 1 つの装置で構成することもできます。その場合は、ステートフル フェイルオーバーとアクティブ/アクティブ DPI は利用できません。
|
|
•
|
アクティブ/アクティブ DPI クラスタリング - このモードでは、フェイルオーバーと負荷分散のために最大 4 つの HA クラスタ ノードを設定できます。負荷分散では、各ノードによってネットワーク トラフィックに対する DPI セキュリティ サービスのアプリケーションの負荷が分散されます。このモードを有効にすると、各クラスタ ノードのスタンバイ装置の利用によりパフォーマンスを向上できます。
|
|
•
|
既定では、この仮想 MAC アドレスは SonicWALL ファームウェアによって指定されるものであり、プライマリまたはセカンダリ装置のいずれの物理 MAC アドレスとも異なります。これにより、設定エラーの発生を防止し、仮想 MAC アドレスの一意性を確保して競合が起こらないようにしています。必要に応じて、仮想 MAC アドレスの手動設定を「高可用性 > 監視」ページで行うことができます。
「高可用性 > 監視」ページで、物理インターフェースと論理インターフェースの監視を設定できます。物理リンク監視を有効にすると、指定された HA インターフェースのリンク検出が可能になります。このリンクの検出は、リンクの動作状態を判断するために物理層で行われます。論理監視とは、SonicWALL を設定して接続先ネットワークの 1 つ以上に存在する信頼性の高い機器を監視することです。HA ペアのアクティブな装置がこの機器との定期的な通信に失敗すると、スタンバイ装置へのフェイルオーバーが実行されます。HA ペアのどちらもこの機器に接続できない場合は、何も処理が行われません。
「高可用性 > 監視」ページで設定されるプライマリおよびセカンダリ IP アドレスは、LAN または WAN インターフェース上で設定でき、以下に示す複数の目的に使用されます。
セカンダリ/スタンバイ装置の管理 IP アドレスを使用すると、Dell SonicWALL ライセンス サーバとライセンスを同期できます。このサーバは、HA ペア単位ではなく装置単位でライセンスを管理します。HA の関連付けを作成する前にセカンダリ装置が MySonicWALL で登録されていた場合でも、管理 IP アドレスからセカンダリ装置にアクセスしているときは、Dell SonicWALL サーバに接続する場合に「システム > ライセンス」ページ上のリンクを使用する必要があります。
「高可用性 > 監視」ページでの設定タスクは、プライマリ装置で実行された後、セカンダリ装置に対して自動的に同期されます。
|
•
|
プライマリ - プライマリ ハードウェア装置を示します。プライマリの識別は手動で指定し、条件による変更の対象にはなりません。通常の動作条件下では、プライマリ ハードウェア装置はアクティブな役割で動作します。
|
|
•
|
セカンダリ - 従属のハードウェア装置を示します。セカンダリの識別は関連に基づく指定であり、プライマリ装置と組み合わせたときに装置によって想定されます。通常の動作条件下では、セカンダリ装置はスタンバイ モードで動作します。プライマリ装置で障害が発生すると、セカンダリ装置がアクティブな役割を引き継ぎます。
|
|
•
|
アクティブ - ハードウェア装置の稼動状態を示します。アクティブの識別子は、プライマリ ハードウェア装置またはセカンダリ ハードウェア装置のいずれかが持つことができる論理的な役割です。
|
|
•
|
スタンバイ - ハードウェア装置のパッシブ状態を示します。スタンバイの識別子は、プライマリ ハードウェア装置またはセカンダリ ハードウェア装置のいずれかが持つことができる論理的な役割です。スタンバイ状態の装置は、アクティブな装置の障害と判断できるイベントが発生したときに、アクティブの役割を引き継ぎます。
|
|
•
|
フェイルオーバー - アクティブな装置の障害と判断された後に、スタンバイ状態の装置がアクティブの役割を引き継ぐ実際のプロセスを表します。障害かどうかの判断は、「タスク リスト」セクションに記載されている設定可能なさまざまな物理的および論理的な監視機能によって行われます。
|
|
•
|
先制 - プライマリ装置に障害が発生し、セカンダリ装置がアクティブの役割を引き継ぐ、フェイルオーバー後の状態を示します。先制を有効にすると、プライマリ装置が稼動状態に復元されたことが確認された後に、プライマリ装置がセカンダリ装置からアクティブの役割を取り戻します。
|